4.8.5. 设计说明¶
4.8.5.1. 源码说明¶
源代码位于 bsp/artinchip/:
bsp/artinchip/drv/tsen/drv_tsen.c,TSenor Driver 层实现
bsp/artinchip/hal/tsen/hal_tsen.c,TSenor HAL 层实现
bsp/artinchip/include/hal/hal_tsen.h,TSenor HAL 层接口头文件
4.8.5.2. 模块架构¶
TSensor 驱动 Driver 层采用 RT-Thread 的Sensor设备驱动框架,如果只使用HAL层也可以支持 baremetal 方式的应用场景。
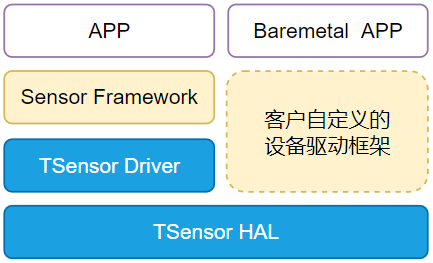
图 4.31 TSensor 驱动的软件架构图¶
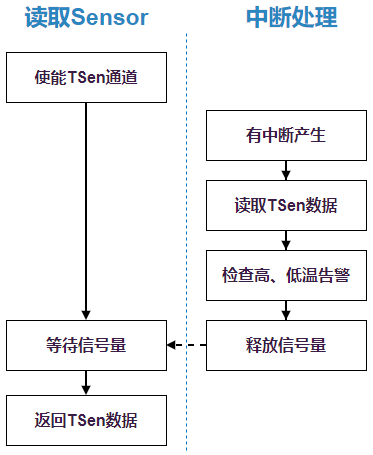
4.8.5.3. 关键流程设计¶
4.8.5.3.1. 初始化流程¶
TSensor 驱动的初始化接口通过 INIT_DEVICE_EXPORT(drv_tsen_init) 完成,会通过调用 Sensor子系统的接口 rt_hw_sensor_register() 注册一个 Sensor设备。
TSensor 控制器的初始化过程,主要步骤有:
初始化模块的clk
注册中断
初始化默认参数
向设备框架中注册Sensor设备
4.8.5.4. 数据结构设计¶
4.8.5.4.1. struct aic_tsen_dev¶
属于 Driver 层内部使用的数据结构,管理TSensor控制器的设备资源:
struct aic_tsen_dev {
struct rt_sensor_device dev;
u32 pclk_rate;
struct aic_tsen_ch *ch;
};
4.8.5.4.2. struct aic_tsen_ch¶
属于 HAL 层接口,管理一个 TSensor 通道的配置信息:
struct aic_tsen_ch {
int id;
bool available;
char name[16];
enum aic_tsen_mode mode;
bool diff_mode;
bool inverted;
u16 latest_data; // 10 * actual temperature value
u16 smp_period; // in seconds
bool hta_enable; // high temperature alarm
u16 hta_thd; // 10 * temperature value
u16 hta_rm_thd; // 10 * temperature value
bool lta_enable; // low temperature alarm
u16 lta_thd; // 10 * temperature value
u16 lta_rm_thd; // 10 * temperature value
bool otp_enable; // over temperature protection
u16 otp_thd; // 10 * temperature value
int slope; // 10000 * actual slope
int offset; // 10000 * actual offset
aicos_sem_t complete;
};
4.8.5.5. Driver 层接口设计¶
以下接口是 TSensor 设备驱动框架的标准接口。
struct rt_sensor_ops
{
rt_size_t (*fetch_data)(struct rt_sensor_device *sensor, void *buf, rt_size_t len);
rt_err_t (*control)(struct rt_sensor_device *sensor, int cmd, void *arg);
};
4.8.5.5.1. aic_tsen_fetch¶
函数原型 |
rt_size_t aic_tsen_fetch(struct rt_sensor_device *sensor, void *buf, rt_size_t len) |
|---|---|
功能说明 |
读取TSensor温度数据 |
参数定义 |
sensor - 指向sensor设备
buf - 用来保存读取到的温度,是struct rt_sensor_data类型的数据结构
len - buf的长度
|
返回值 |
1,成功; <0,失败 |
注意事项 |
目前仅支持读取CPU位置处的TSensor |
4.8.5.5.2. aic_tsen_control¶
函数原型 |
rt_err_t aic_tsen_control(struct rt_sensor_device *sensor, int cmd, void *args) |
|---|---|
功能说明 |
TSensor 驱动的ioctl接口 |
参数定义 |
sensor - 指向sensor设备
cmd - ioctl 命令码
args - ioctl 命令相应的参数
|
返回值 |
-1,失败 |
注意事项 |
目前暂未实现此接口中的ioctl命令,所以统一返回-1。 不影响正常读数据功能 |
4.8.5.6. HAL 层接口设计¶
HAL 层的函数接口声明存放在 hal_tsen.h 中,主要接口有:
void hal_tsen_enable(int enable);
void hal_tsen_ch_enable(u32 ch, int enable);
int hal_tsen_ch_init(struct aic_tsen_ch *chan, u32 pclk);
int hal_tsen_get_temp(struct aic_tsen_ch *chan, s32 *val);
s32 hal_tsen_data2temp(struct aic_tsen_ch *chan);
u16 hal_tsen_temp2data(struct aic_tsen_ch *chan, s32 temp);
void hal_tsen_status_show(struct aic_tsen_ch *chan);
irqreturn_t hal_tsen_irq_handle(int irq, void *arg);
4.8.5.7. Demo¶
此Demo是 sensor_polling 命令的部分代码(详见kernel/rt-thread/components/drivers/sensors/sensor_cmd.c),可以作为 TSensor设备的使用参考:
static void sensor_polling(int argc, char **argv)
{
rt_uint16_t num = 10;
rt_device_t dev = RT_NULL;
rt_sensor_t sensor;
struct rt_sensor_data data;
rt_size_t res, i;
rt_int32_t delay;
rt_err_t result;
dev = rt_device_find(argv[1]);
if (dev == RT_NULL)
{
LOG_E("Can't find device:%s", argv[1]);
return;
}
if (argc > 2)
num = atoi(argv[2]);
sensor = (rt_sensor_t)dev;
delay = sensor->info.period_min > 100 ? sensor->info.period_min : 100;
for (i = 0; i < num; i++)
{
res = rt_device_read(dev, 0, &data, 1);
if (res != 1)
{
LOG_E("read data failed!size is %d", res);
}
else
{
sensor_show_data(i, sensor, &data);
}
rt_thread_mdelay(delay);
}
rt_device_close(dev);
}