6.7.5. 设计说明¶
6.7.5.1. 源码说明¶
源文件目录:
aic-mpp$ tree
.
├── base // 公共模块:包括内存分配和链表等基础功能
│ ├── memory
├── ge // 2D 图形加速模块
├── ve // 编解码器模块
| ├── include // ve 模块头文件
│ ├── common // 编解码器公共组件
| ├── decoder
│ ├── h264 // h.264 解码模块
│ ├── jpeg // jpg 解码模块
│ └── png // png 解码模块
├── vin // video input模块
├── include // mpp 对外头文件
├── mpp_test // mpp 测试用例
6.7.5.2. 软件架构¶
mpp 软件框图如下所示:
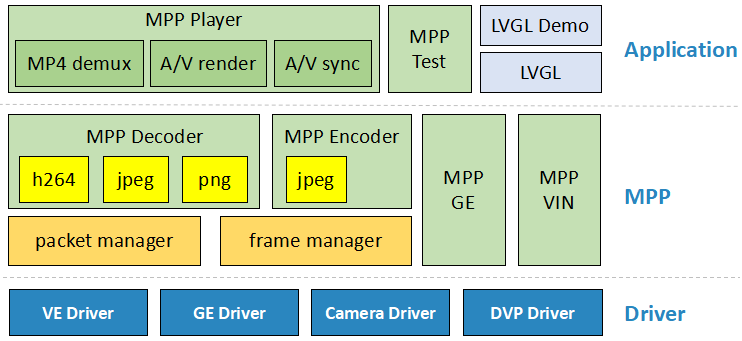
图 6.72 MPP 软件的系统框图¶
总体上,分为三层:
应用层:Luban-Lite提供了MPP player(播放器)、MPP测试、LVGL Demo,也支持增加其他App
MPP中间件:从功能上可以划分为4大块
MPP Decoder,实现h264、jpeg、png等解码功能
MPP Encoder,实现jpeg编码。
MPP GE,实现2D图形加速功能
MPP VIN,实现视频输入采集的功能
Driver层:MPP需要用到的驱动有VE、GE、DVP、Camera驱动
6.7.5.3. MPP Decoder 设计及接口说明¶
MPP Decoder 由三个主要模块组成:
解码模块(H264、JPEG、PNG等):负责将码流数据解码成视频图像
输入码流数据管理模块(Packet manager):负责视频、图片码流数据和 buffer 的管理
显示帧管理模块(Frame manager):负责解码图像 buffer 的管理
6.7.5.3.1. packet 管理机制¶
Packet manager 负责管理码流数据和 buffer。初始化时,该模块申请一块物理连续的内存(buffer大小可由外部配置),用于存放视频/图片码流数据。
Packet manager 管理的数据单元为 packet,packet 表示一笔码流数据,它可以是完整的一帧数据,也支持不是完整的一帧数据。 每个 packet 与物理内存中的码流数据一一对应,它记录了每一笔码流的物理内存基地址、物理内存结束地址、物理内存偏移、虚拟内存地址、码流数据长度等信息。
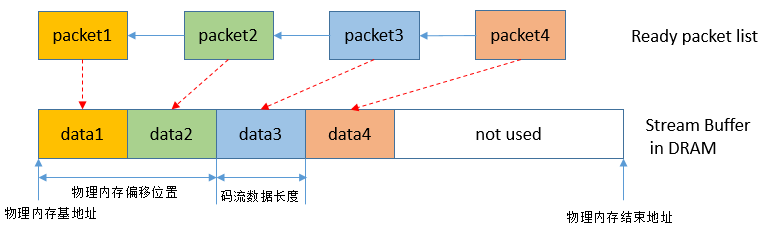
图 6.73 packet管理¶
packet 通过 empty list 和 ready list 两个链表进行管理。 其中,empty list 用于存放空闲的 packet,ready list 用于存放待解码的 packet。
送码流数据时,从 empty list 获取一个空闲 packet,填充数据后,再把 packet 放入 ready list;
解码前,解码器从 ready list 获取一个填充数据的 packet,使用完后再把该 packet 放入 empty list。
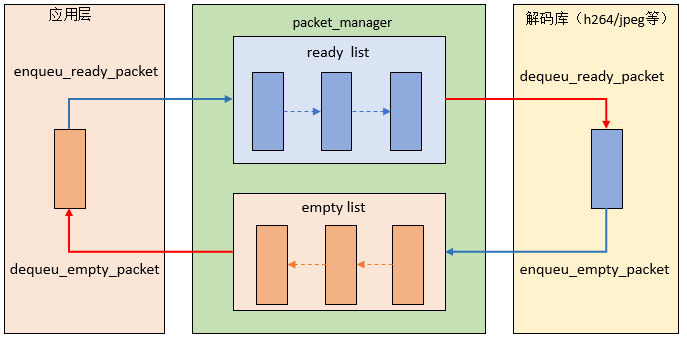
图 6.74 packet manager 调用流程¶
6.7.5.3.2. frame 管理机制¶
Frame manager 负责管理图像 buffer。Frame manager 内部通过两个链表来管理图像 buffer:empty list 和 render list。 其中,empty list 存放可以给解码输出使用的图像 buffer,render list 存放解码完成但还未显示的图像 buffer。 在运行过程中,正在显示的图像 buffer 和用于参考的图像 buffer 可能不在这两个 list 中。
frame 状态迁移
初始化时,该模块申请指定个数的图像 buffer(个数可由外部配置),每个图像 buffer 的信息存放在内部数组中。 每个图像 buffer 有4种状态:
Decoding: 该帧正在被解码器使用(用于解码输出或作为参考帧)
wait_render: 该帧在 render list 中,等待显示
Rendering: 该帧正在被显示占用
IDLE: 该帧处于空闲状态(既没有被显示占用,也没有被解码器用作参考帧)
其状态转移如下图所示:
初始化时,所有图像 buffer 都在 empty list 中,此时处于 IDLE 状态;
解码模块从 empty list 链表头部获取一个空图像 buffer,此时 buffer 被解码模块占用,从 IDLE 状态变为 Decoding 状态;
解码完成后,解码模块还图像数据。此时分两种情况:
1)如果当前帧还未被显示,该帧加入 render list 链表尾部,从 Decoding 状态变为 wait render 状态;
2)该帧不再用做参考帧且已显示完成,此时该帧加入 empty list 链表尾部,由 Decoding 状态进入 IDLE 状态;
显示模块从 render list 链表头部取一帧图像,此时当前帧由 wait render 状态进入 Rendering 状态;
显示模块还图像 buffer,分两种情况:
1)如果当前帧不用于参考,此时由 Rendering 状态回到IDLE状态,该帧加入 empty list 链表尾部;
2)如果当前帧用于参考,此时由 Rendering 状态进入Decoding状态,该图像 buffer 不进入任何队列,等待解码器还参考帧;
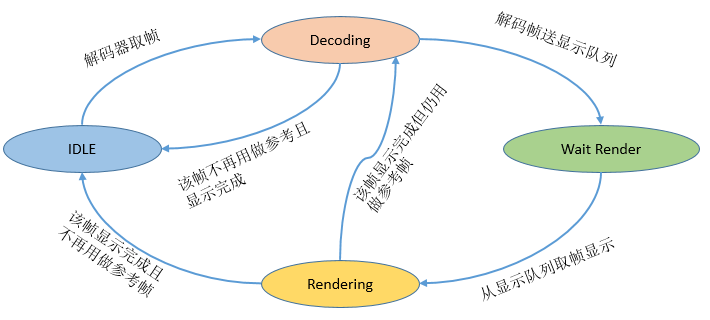
图 6.75 frame状态迁移¶
frame manager 调用流程
对于 JPEG、PNG 这类没有参考帧概念的编码格式,每一帧的状态是唯一的,解码后的数据帧可直接送 render list
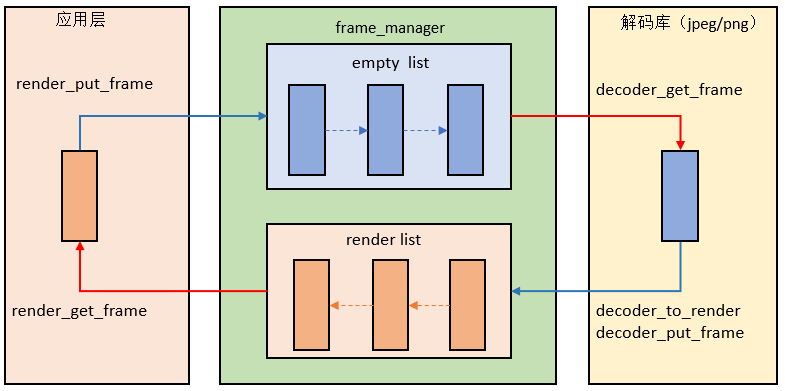
图 6.76 frame manager 调用流程(JPEG/PNG)¶
但对于 H264 这类有参考帧的编码格式,解码后的视频帧可能既被显示占用也会被解码器用作参考帧,并且由于双向参考帧的存在, 视频帧需要重排序后才能送显示。 不同于JPG,H264 解码库内部存在一个 delay list 用于为显示帧重排序。
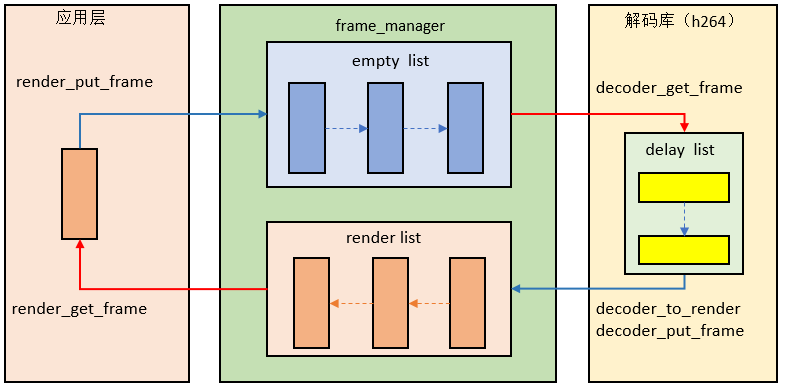
图 6.77 frame manager 调用流程(H264)¶
6.7.5.3.3. 物理连续内存使用情况¶
H264 解码所需的物理连续内存如下所示:
内存占用模块 |
计算方式 |
说明 |
|---|---|---|
输入码流 |
大小由应用层配置 |
|
输出帧 |
width*height*3/2*frame_num |
frame_num至少需要(参考帧个数+1)个
显示占用个数可由应用层通过struct decode_config
结构体中的extra_frame_num 配置
|
帧内预测(需要上一行数据) |
帧格式:width*2
MBAFF:width*4
|
|
宏块信息 |
固定12K |
|
dblk模块(上一个宏块行最后4行数据) |
帧格式:width*8
MBAFF:width*16
|
|
co-located信息 |
固定68K |
|
每一帧co-located数据缓存 |
(width/16)*(height/16)*32*frame_num
|
注解
co-located 两个buffer,I、P帧解码时会往buffer里写数据,B 帧解码时从buffer读数据。 如果当前码流中没有 B 帧,这两块内存也需要申请。
6.7.5.3.4. MPP Decoder 调用流程¶
在调用 MPP Decoder 的解码函数时,解码模块从 Packet manager 取一笔码流,同时从 Frame maneger 取一个空闲图像 buffer,对码流进行解码 并输出图像到图像 buffer。
解码后,解码模块将码流 buffer 归还 Packet manager,将解码图像 buffer 归还 Frame maneger。
为保证解码效率,建议调用者创建3个线程实现解码功能:
- send data thread
通过 mpp_decoder_get_packet 和 mpp_decoder_put_packet 这两个接口把码流数据送到 packet 管理模块
- decode thread
通过调用 mpp_decoder_decode 控制解码,解码库从 packet 管理模块取一笔码流数据,解码完成后,将视频帧送入 frame 管理模块
- render thread
通过 mpp_decoder_get_frame 和 mpp_decoder_put_frame 两个接口从 frame 管理模块获取视频帧,并控制该帧显示时机
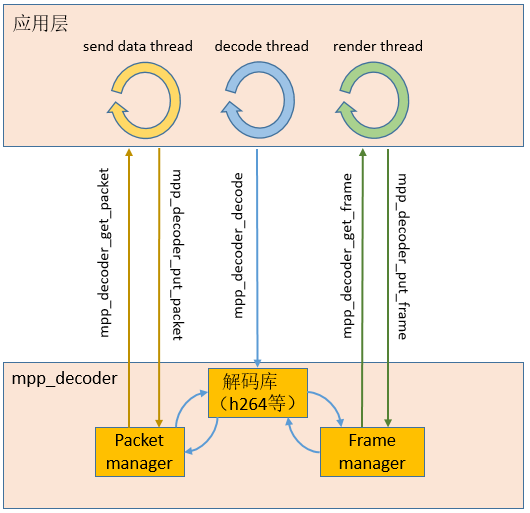
图 6.78 MPP Decoder 调用流程¶
6.7.5.3.5. MPP Decoder 数据结构¶
6.7.5.3.5.1. struct decode_config¶
struct decode_config {
enum mpp_pixel_format pix_fmt; // output pixel format
int bitstream_buffer_size; // bitstream buffer size in pm
int packet_count; // packet number in pm
int extra_frame_num; // extra frame number in fm
};
decode_config 结构体用于配置解码器初始化使用的参数。
pix_fmt 表示解码输出的颜色格式
bitstream_buffer_size 表示存放输入码流缓存的总长度
packet_count 表示 packet manager 中 packet 的最大个数
extra_frame_num 表示解码器额外分配的帧个数,主要用于缓存显示帧以保证显示平滑。
6.7.5.3.5.2. struct mpp_packet¶
struct mpp_packet {
void *data;
int size;
long long pts;
unsigned int flag;
};
mpp_packet 结构体用于表示输入码流信息。
data 表示码流数据存放的起始地址
size 表示该笔码流数据长度
pts 表示该笔码流的时间戳
flag 表示该笔码流的标记位,目前仅用于确定该码流是否为最后一笔码流(PACKET_FLAG_EOS)
6.7.5.3.5.3. struct mpp_frame¶
struct mpp_size {
int width;
int height;
};
struct mpp_rect {
int x;
int y;
int width;
int height;
};
enum mpp_buf_type {
MPP_DMA_BUF_FD,
MPP_PHY_ADDR,
};
struct mpp_buf {
enum mpp_buf_type buf_type;
union {
int fd[3];
unsigned int phy_addr[3];
};
unsigned int stride[3];
struct mpp_size size;
unsigned int crop_en;
struct mpp_rect crop;
enum mpp_pixel_format format;
unsigned int flags;
};
buf_type:表示 mpp_buf 类型,以 fd 方式 MPP_DMA_BUF_FD 或 以物理地址方式 MPP_PHY_ADDR;
fd[3]:表示 buffer 三个分量的 fd
phy_addr[3]:表示 buffer 三个分量的物理地址
stride[3]:表示 buffer 三个分量的 stride
size:表示 buffer 的宽、高
crop_en: 表示该 buffer 是否需要 crop
crop:表示该 buffer 的 crop 信息
format: 表示该 buffer 的颜色格式类型
struct mpp_frame {
struct mpp_buf buf;
long long pts;
unsigned int id;
unsigned int flags;
};
buf:表示 mpp_frame 的 buffer 信息
pts:表示 mpp_frame 的时间戳
id:表示 mpp_frame 的唯一标识
flags:表示 mpp_frame 的标志位
6.7.5.3.5.4. enum mpp_dec_errno¶
enum mpp_dec_errno {
DEC_ERR_NOT_SUPPORT = 0x90000001,
DEC_ERR_NO_EMPTY_PACKET = 0x90000002, // no packet in empty list
DEC_ERR_NO_READY_PACKET = 0x90000003, //
DEC_ERR_NO_EMPTY_FRAME = 0x90000004, //
DEC_ERR_NO_RENDER_FRAME = 0x90000005, //
DEC_ERR_NULL_PTR = 0x90000006,
DEC_ERR_FM_NOT_CREATE = 0x90000006,
};
DEC_ERR_NOT_SUPPORT:该码流不支持
DEC_ERR_NO_EMPTY_PACKET:packet manager 中缺少空闲的 packet,可能是解码速度小于送 packet 速度,此时需要等待一段时间;
DEC_ERR_NO_READY_PACKET:packet manager 中缺少填好码流数据的 packet,可能是送 packet 速度小于解码速度,此时需要等待一段时间;
DEC_ERR_NO_EMPTY_FRAME:frame manager 中缺少空闲的 frame,表示所有帧都处于使用状态,通常是解码速度大于显示速度导致,此时需要等待一段时间;
DEC_ERR_NO_RENDER_FRAME:frame manager 中缺少待显示的 frame,表示所有帧都处于空闲状态,通常是解码速度小于显示速度导致,此时需要等待一段时间;
DEC_ERR_NULL_PTR:表示接口函数输入参数存在空指针
DEC_ERR_FM_NOT_CREATE:表示在获取待显示 frame 时 frame manager 还未创建
6.7.5.3.5.5. enum mpp_codec_type¶
enum mpp_codec_type {
MPP_CODEC_VIDEO_DECODER_H264 = 0x1000, // decoder
MPP_CODEC_VIDEO_DECODER_MJPEG,
MPP_CODEC_VIDEO_DECODER_PNG,
MPP_CODEC_VIDEO_ENCODER_H264 = 0x2000, // encoder
};
mpp_codec_type 枚举类型表示支持的编解码格式。
6.7.5.3.5.6. enum mpp_dec_cmd¶
enum mpp_dec_cmd {
MPP_DEC_INIT_CMD_SET_EXT_FRAME_ALLOCATOR, // frame buffer allocator
MPP_DEC_INIT_CMD_SET_ROT_FLIP_FLAG,
MPP_DEC_INIT_CMD_SET_SCALE,
MPP_DEC_INIT_CMD_SET_CROP_INFO,
MPP_DEC_INIT_CMD_SET_OUTPUT_POS,
};
MPP_DEC_INIT_CMD_SET_EXT_FRAME_ALLOCATOR:表示由外部设置帧 buffer 分配器
MPP_DEC_INIT_CMD_SET_ROT_FLIP_FLAG: 表示设置旋转、镜像后处理,只用于JPEG
MPP_DEC_INIT_CMD_SET_SCALE: 表示设置缩放系数,只用于JPEG
MPP_DEC_INIT_CMD_SET_CROP_INFO:表示设置输出 crop 信息
MPP_DEC_INIT_CMD_SET_OUTPUT_POS:表示设置解码图像在输出缓存的位置
6.7.5.3.6. MPP Decoder 接口设计¶
接口如下 :
struct decode_config {
enum mpp_pixel_format pix_fmt; // output pixel format
int bitstream_buffer_size; // bitstream buffer size in pm
int packet_count; // packet number in pm
int extra_frame_num; // extra frame number in fm
};
struct mpp_decoder* create_mpp_decoder(enum mpp_codec_type type);
void destory_mpp_decoder(struct mpp_decoder* decoder);
int mpp_decoder_init(struct mpp_decoder *decoder, struct decode_config *config);
int mpp_decoder_decode(struct mpp_decoder* decoder);
int mpp_decoder_control(struct mpp_decoder* decoder, int cmd, void *param);
int mpp_decoder_reset(struct mpp_decoder* decoder);
int mpp_decoder_get_packet(struct mpp_decoder* decoder, struct mpp_packet* packet, int size);
int mpp_decoder_put_packet(struct mpp_decoder* decoder, struct mpp_packet* packet);
int mpp_decoder_get_frame(struct mpp_decoder* decoder, struct mpp_frame* frame);
int mpp_decoder_put_frame(struct mpp_decoder* decoder, struct mpp_frame* frame);
6.7.5.3.6.1. mpp_decoder_create¶
函数原型 |
struct mpp_decoder* mpp_decoder_create(enum mpp_codec_type type) |
|---|---|
功能说明 |
创建mpp_decoder对象 |
参数定义 |
type: 解码器类型 |
返回值 |
mpp_decoder对象 |
注意事项 |
6.7.5.3.6.2. mpp_decoder_destory¶
函数原型 |
void mpp_decoder_destory(struct mpp_decoder* decoder) |
|---|---|
功能说明 |
销毁mpp_decoder对象 |
参数定义 |
decoder: mpp_decoder对象 |
返回值 |
无 |
注意事项 |
6.7.5.3.6.3. mpp_decoder_init¶
函数原型 |
int mpp_decoder_init(struct mpp_decoder *decoder, struct decode_config *config) |
|---|---|
功能说明 |
初始化解码器 |
参数定义 |
decoder: mpp_decoder对象
config:解码器的配置参数
|
返回值 |
0:成功
<0:失败
|
注意事项 |
6.7.5.3.6.4. mpp_decoder_decode¶
函数原型 |
int mpp_decoder_decode(struct mpp_decoder* decoder) |
|---|---|
功能说明 |
解码一笔数据 |
参数定义 |
decoder: mpp_decoder对象 |
返回值 |
0:成功
<0:失败
|
注意事项 |
6.7.5.3.6.5. mpp_decoder_control¶
函数原型 |
int mpp_decoder_control(struct mpp_decoder* decoder, int cmd, void* param) |
|---|---|
功能说明 |
向mpp_decoder对象发送控制命令 |
参数定义 |
decoder: mpp_decoder对象
cmd: 控制命令类型
param: 控制参数
|
返回值 |
0:成功
<0:失败
|
注意事项 |
6.7.5.3.6.6. mpp_decoder_reset¶
函数原型 |
int mpp_decoder_reset(struct mpp_decoder* decoder) |
|---|---|
功能说明 |
重置mpp_decoder对象 |
参数定义 |
decoder: mpp_decoder对象
|
返回值 |
0:成功
<0:失败
|
注意事项 |
6.7.5.3.6.7. mpp_decoder_get_packet¶
函数原型 |
int mpp_decoder_get_packet(struct mpp_decoder* decoder, struct mpp_packet* packet, int size) |
|---|---|
功能说明 |
获取一个写码流数据的packet |
参数定义 |
decoder: mpp_decoder对象
packet:码流数据结构指针
size:上层应用申请packet的buffer大小
|
返回值 |
0:成功
<0:失败
|
注意事项 |
6.7.5.3.6.8. mpp_decoder_put_packet¶
函数原型 |
int mpp_decoder_put_packet(struct mpp_decoder* decoder, struct mpp_packet* packet) |
|---|---|
功能说明 |
归还码流数据的packet对象 |
参数定义 |
decoder: mpp_decoder对象
packet:码流数据结构指针
|
返回值 |
0:成功
<0:失败
|
注意事项 |
6.7.5.3.6.9. mpp_decoder_get_frame¶
函数原型 |
int mpp_decoder_get_frame(struct mpp_decoder* decoder, struct mpp_frame* frame) |
|---|---|
功能说明 |
获取一个视频帧对象 |
参数定义 |
decoder: mpp_decoder对象
frame:视频帧数据结构指针
|
返回值 |
0:成功
<0:失败
|
注意事项 |
6.7.5.3.6.10. mpp_decoder_put_frame¶
函数原型 |
int mpp_decoder_put_frame(struct mpp_decoder* decoder, struct mpp_frame* frame) |
|---|---|
功能说明 |
归还视频帧对象 |
参数定义 |
decoder: mpp_decoder对象
frame:视频帧数据结构指针
|
返回值 |
0:成功
<0:失败
|
注意事项 |
6.7.5.3.7. MPP Decoder 参考Demo¶
以下 Demo 为基本流程调用,具体实现可以参考代码 mpp/mpp_test/picture_decoder_test.c
//* 1.创建 mpp_decoder 对象
struct mpp_decoder* dec = mpp_decoder_create(type);
struct decode_config config;
config.bitstream_buffer_size = (file_len + 1023) & (~1023);
config.extra_frame_num = 0;
config.packet_count = 1;
config.pix_fmt = MPP_FMT_ARGB_8888;
//* 2. 初始化 mpp_decoder
mpp_decoder_init(dec, &config);
//* 3. 获取一个空的packet
struct mpp_packet packet;
memset(&packet, 0, sizeof(struct mpp_packet));
mpp_decoder_get_packet(dec, &packet, file_len);
//* 4. 把视频码流数据拷贝到 packet
fread(packet.data, 1, file_len, fp);
packet.size = file_len;
packet.flag = PACKET_FLAG_EOS;
//* 5. 归还 packet
mpp_decoder_put_packet(dec, &packet);
//* 6. 解码该笔码流数据
mpp_decoder_decode(dec);
//* 7. 获取解码后视频帧数据
struct mpp_frame frame;
memset(&frame, 0, sizeof(struct mpp_frame));
mpp_decoder_get_frame(dec, &frame);
//* 8. 显示该视频帧
// render_frame...
//* 9. 归还该视频帧
mpp_decoder_put_frame(dec, &frame);
//* 10. 销毁 mpp_decoder
mpp_decoder_destory(dec);
6.7.5.4. MPP Encoder 设计及接口说明¶
MPP Encoder 目前只支持 JPEG 图片编码。
6.7.5.4.1. 接口设计¶
6.7.5.4.1.1. mpp_encode_jpeg¶
函数原型 |
int mpp_encode_jpeg(struct mpp_frame* frame, int quality, int dma_buf_fd, int buf_len, int* len) |
|---|---|
功能说明 |
编码一帧 JPEG 图片 |
参数定义 |
frame: 待编码的原始 YUV 数据
quality: 编码质量,取值范围1~100,1表示编码图片质量最差,100表示最好
dma_buf_fd:输出 JPEG 图片存放的 dma-buf fd
buf_len:输出 JPEG 图片 dma-buf 的长度
len: 输出 JPEG 图片的真实大小
|
返回值 |
0: 成功
<0:失败
|
注意事项 |
小技巧
输出 JPEG 图片的缓存 buffer 由调用者申请,但调用者并不知道编码后图片的实际大小, 为避免 VE 写输出数据时越界,该 buffer 需要预先申请较大的内存。
6.7.5.4.2. MPP Encoder 参考Demo¶
以下 Demo 为基本流程调用,具体实现可以参考代码 mpp/mpp_test/jpeg_encoder_test.c
//* 1. 获取 dma-buf device 句柄
int dma_fd = dmabuf_device_open();
//* 2. 设置输入 YUV 数据结构体
struct mpp_frame frame;
// ....
//* 3. 申请编码输出 buffer
int len = 0;
int buf_len = width * height * 4/5 * quality / 100;
int jpeg_data_fd = dmabuf_alloc(dma_fd, buf_len);
//* 4. 编码 JPEG 图片
mpp_encode_jpeg(&frame, quality, jpeg_data_fd, buf_len, &len);
//* 5. 保存编码后 JPEG 图片
unsigned char* jpeg_vir_addr = dmabuf_mmap(jpeg_data_fd, buf_len);
FILE* fp_save = fopen("/save.jpg", "wb");
fwrite(jpeg_vir_addr, 1, len, fp_save);
fclose(fp_save);
//* 6. 释放资源
dmabuf_munmap(jpeg_vir_addr, buf_len);
dmabuf_free(jpeg_data_fd);
dmabuf_device_close(dma_fd);
6.7.5.5. MPP zlib 设计及接口说明¶
MPP zlib 的功能:利用硬件加速解压 zlib 文件。
6.7.5.5.1. 接口设计¶
6.7.5.5.1.1. mpp_zlib_uncompressed¶
函数原型 |
int mpp_zlib_uncompressed(unsigned char *compressed_data,unsigned int compressed_len,
unsigned char *uncompressed_data,unsigned int uncompressed_len);
|
|---|---|
功能说明 |
解压zlib文件 |
参数定义 |
compressed_data - 压缩数据起始地址
compressed_len - 压缩数据长度
uncompressed_data - 存放解压数据 buffer 的起始地址
uncompressed_len - 存放解压数据 buffer 的长度
|
返回值 |
>0,解压数据实际长度; <0,失败 |
注意事项 |
compressed_data - 16 byte 对齐,填充数据后,需要刷 cache
compressed_len - 实际有效数据长度
uncompressed_data - 8 byte 对齐,获取数据前,先清掉 cache
uncompressed_len - 8 byte 对齐,必须大于等于解压数据实际长度
|
6.7.5.5.2. 参考Demo¶
#include "dfs.h"
#include "unistd.h"
#include "mpp_zlib.h"
#include "mpp_mem.h"
#include "mpp_log.h"
#include <console.h>
#include "aic_core.h"
static void print_help(char *program)
{
printf("Compile time: %s\n", __TIME__);
printf("usage:%s input_file out_file out_put_buffer_len \n", program);
printf("note:out_put_buffer_len >= out_file_size \n");
printf("exsample:%s readme.zlib readme.txt 204800\n",program);
}
int zlib_test(int argc,char **argv)
{
int ret = 0;
int fd_in = 0;
int fd_out = 0;
int file_len;
int in_len_align;
int out_len;
int out_len_align;
int r_len=0,w_len=0;
int uncompress_len;
unsigned long in_buff = 0;;
unsigned long in_buff_align;
unsigned long out_buff = 0;
unsigned long out_buff_align;
int align;
unsigned int before;
unsigned int after;
if (argc != 4) {
print_help(argv[0]);
return -1;
}
fd_in = open(argv[1], O_RDONLY);
if (fd_in < 0) {
loge("open %s fail\n",argv[1]);
return -1;
}
file_len = lseek(fd_in, 0, SEEK_END);
lseek(fd_in, 0, SEEK_SET);
#define INPUT_BUFFER_ALIGN 16
if (CACHE_LINE_SIZE > INPUT_BUFFER_ALIGN) {
align = CACHE_LINE_SIZE;
} else {
align = INPUT_BUFFER_ALIGN;
}
//input buffer len align max of {CACHE_LINE_SIZE,INPUT_BUFFER_ALIGN}
in_len_align = (file_len+align-1)/align*align;
in_buff = (unsigned long)aicos_malloc(MEM_CMA, in_len_align+align-1);
if (in_buff == 0) {
loge("mpp_alloc fail\n");
ret = -1;
goto _exit;
}
//input buffer addr align max of {CACHE_LINE_SIZE,INPUT_BUFFER_ALIGN}
in_buff_align = ((in_buff+align-1)&(~(align-1)));
r_len = read(fd_in,(void *)in_buff_align, file_len);
logd("r_len:%d,in_len:%d\n",r_len,file_len);
//flush cache*
aicos_dcache_clean_range((unsigned long *)in_buff_align, (int64_t)in_len_align);
out_len = atoi(argv[3]);
if (out_len < file_len) {
loge("param error :%d\n",out_len);
ret = -1;
goto _exit;
}
// out buffer len align CACHE_LINE_SIZE
out_len_align = (out_len + CACHE_LINE_SIZE -1)/CACHE_LINE_SIZE*CACHE_LINE_SIZE;
out_buff = (unsigned long)aicos_malloc(MEM_CMA, out_len_align+(CACHE_LINE_SIZE -1));
if (out_buff == 0) {
loge("mpp_alloc fail\n");
ret = -1;
goto _exit;
}
//out buffer addr align CACHE_LINE_SIZE
out_buff_align = ((out_buff+CACHE_LINE_SIZE -1)&(~(CACHE_LINE_SIZE-1)));
// uncompressed
before = aic_get_time_us();
uncompress_len = mpp_zlib_uncompressed((unsigned char*)in_buff_align, file_len, (unsigned char*)out_buff_align, out_len_align);
after = aic_get_time_us();
logd("diff:%u\n",after-before);
if (uncompress_len < 0) {
loge("mpp_zlib_uncompressed fail\n");
ret = -1;
goto _exit;
}
//save uncompressed data
fd_out = open(argv[2], O_RDWR|O_CREAT);
if (fd_out < 0) {
loge("open %s fail\n",argv[2]);
ret = -1;
goto _exit;
}
// invalid cache
aicos_dcache_invalid_range((unsigned long *)out_buff_align, (int64_t)out_len_align);
w_len = write(fd_out,(void *)out_buff_align, uncompress_len);
logd("w_len:%d,uncompress_len:%d\n", w_len,uncompress_len);
close(fd_out);
_exit:
if(out_buff)
aicos_free(MEM_CMA, (void *)out_buff);
if(in_buff)
aicos_free(MEM_CMA, (void *)in_buff);
if(fd_in)
close(fd_in);
return ret;
}
6.7.5.6. MPP GE 设计及接口说明¶
由于驱动支持非命令队列和命令队列两种模式,在提供的用户MPP接口中,对调用驱动的接口进行了封装,保持了统一的调用API, 建议用户统一使用MPP中间层API。在命令队列模式下,task会先缓存在用户的cmd buffer中,当调用mpp_ge_emit后, 会通过write接口把命令写入内核的ring buffer。
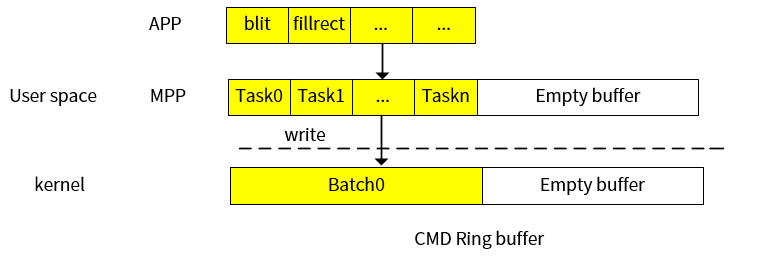
图 6.79 应用调用MPP框架¶
6.7.5.6.1. mpp_ge_open¶
struct mpp_ge *mpp_ge_open();
功能说明 |
打开ge设备 |
|---|---|
参数定义 |
无
|
返回值 |
struct mpp_ge 结构体指针
NULL:失败
|
注意事项 |
无
|
6.7.5.6.2. mpp_ge_close¶
void mpp_ge_close(struct mpp_ge *ge);
功能说明 |
关闭ge设备 |
|---|---|
参数定义 |
ge: struct mpp_ge 结构体指针
|
返回值 |
无
|
注意事项 |
无
|
6.7.5.6.3. mpp_ge_get_mode¶
enum ge_mode mpp_ge_get_mode(struct mpp_ge *ge);
功能说明 |
获取GE模式 |
|---|---|
参数定义 |
ge: struct mpp_ge 结构体指针
|
返回值 |
enum ge_mode枚举类型
通过返回值可以获取GE是否工作在命令队列
模式
|
注意事项 |
无
|
6.7.5.6.4. mpp_ge_fillrect¶
int mpp_ge_fillrect(struct mpp_ge *ge, struct ge_fillrect *fillrect);
功能说明 |
矩形填充 |
|---|---|
参数定义 |
ge: struct mpp_ge结构体指针
fillrect:struct ge_fillrect结构体指针
|
返回值 |
0:成功
<0:失败
|
注意事项 |
normal(非命令队列)模式此接口是同步
的。
命令队列模式此接口是异步的:
(1)当用户的缓存buffer足够时候仅把
命令缓存在用户
(2)当用户的缓存空间不够的时候,先
通过write接口,把缓存的命令全部
写入驱动,然后再把当前命令缓存到
用户buffer
|
矩形填充在目标图像中指定一块矩形区域,填充颜色格式只能为ARGB8888格式, 在进行固定颜色填充的时候,不支持scaler,不支持90/180/270度旋转,不支持镜像, 填充的颜色可以和目标层进行alpha blending和color key。
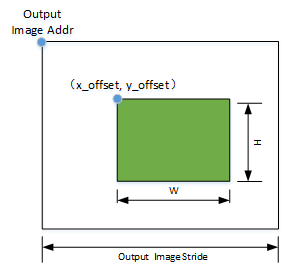
图 6.80 矩形填充¶
6.7.5.6.5. mpp_ge_bitblt¶
int mpp_ge_bitblt(struct mpp_ge *ge, struct ge_bitblt *blt);
功能说明 |
位块搬移 |
|---|---|
参数定义 |
ge: struct mpp_ge结构体指针
blt:struct ge_bitblt结构体指针
|
返回值 |
0:成功
<0:失败
|
注意事项 |
normal(非命令队列)模式此接口是同步
的。
命令队列模式此接口是异步的:
(1)当用户的缓存buffer足够时候仅把
命令缓存在用户
(2)当用户的缓存空间不够的时候,先
通过write接口,把缓存的命令全部
写入驱动,然后再把当前命令缓存到
用户buffer
|
位块搬移可以分两种情况:
原图的矩形区域搬移到目标图的矩形区域中不进行缩放
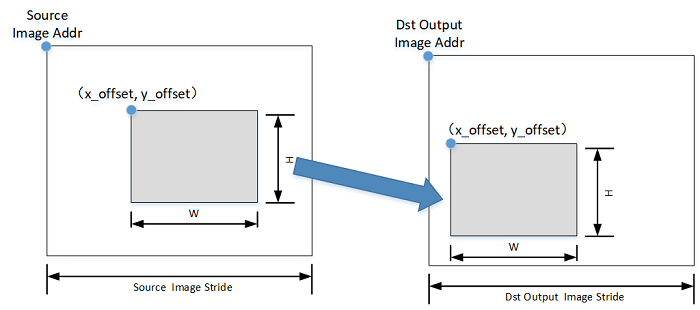
图 6.81 不进行缩放¶
原图的矩形区域搬移到目标图的矩形区域中同时进行放大或者缩小
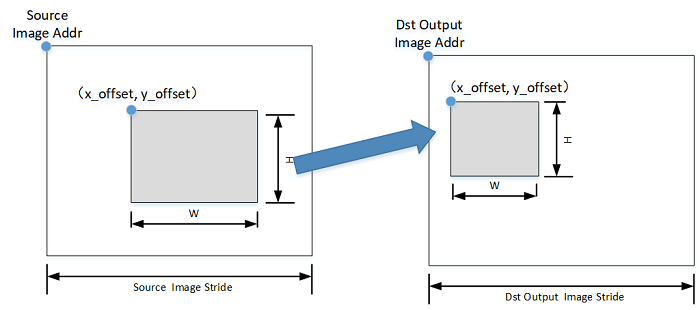
图 6.82 进行缩放¶
在进行位块搬移的同时可以进行alpha blending和color key,同时也支持90/180/270度旋转和镜像。
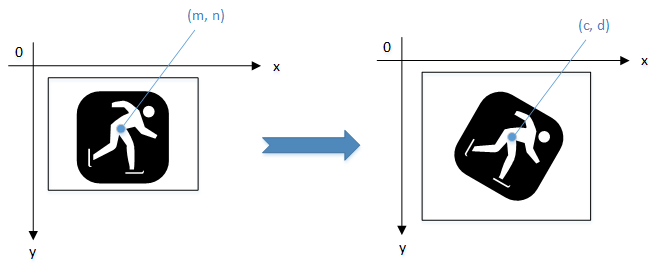
6.7.5.6.6. mpp_ge_rotate¶
int mpp_ge_rotate(struct mpp_ge *ge, struct ge_rotation *rot);
功能说明 |
任意角度旋转 |
|---|---|
参数定义 |
ge: struct mpp_ge结构体指针
rot:struct ge_rotation结构体指针
|
返回值 |
0:成功
<0:失败
|
注意事项 |
normal(非命令队列)模式此接口是同步
的。
命令队列模式此接口是异步的:
(1)当用户的缓存buffer足够时候仅把
命令缓存在用户
(2)当用户的缓存空间不够的时候,先
通过write接口,把缓存的命令全部
写入驱动,然后再把当前命令缓存到
用户buffer
|
进行任意角度旋转的时候可以进行alpha blending,并且可以指定原图和目标图的旋转中心,任意角度旋转原图和目标图都只支持RGB格式。 其中旋转角度传给驱动的是旋转角度的sin和cos值,为2.12定点数,其中小数部分12bits ,则应用程序计算sin和cos值的方法如下:
#include <stdio.h>
#include <math.h>
#define PI 3.14159265
#define SIN(x) (sin(x* PI / 180.0))
#define COS(x) (cos(x* PI / 180.0))
double degree = 30.0 // (0 <= degree < 360)
angle_sin = (int)(SIN(x) * 4096);
angle_cos = (int)(COS(x) * 4096);
// 应用程序也可以预先生成需要的角度的sin和cos值列表,通过查表减小计算量
6.7.5.6.7. mpp_ge_emit¶
iint mpp_ge_emit(struct mpp_ge *ge);
功能说明 |
向驱动发送命令 |
|---|---|
参数定义 |
ge: struct mpp_ge结构体指针
|
返回值 |
0:成功
<0:失败
|
注意事项 |
normal(非命令队列)模式此接口为空,
不产生任何作用
命令队列模式此接口通过write接口,
把用户buffer中缓存的命令都写入驱动
|
6.7.5.6.8. mpp_ge_sync¶
iint mpp_ge_sync(struct mpp_ge *ge);
功能说明 |
阻塞等待所有任务执行完成 |
|---|---|
参数定义 |
ge: struct mpp_ge结构体指针
|
返回值 |
0:成功
<0:失败
|
注意事项 |
normal(非命令队列)模式此接口为空,
不产生任何作用
命令队列模式此接口通过调用IOC_GE_SYNC
接口,等待所有任务都完成
|
6.7.5.7. MPP VIN 设计及接口说明¶
MPP VIN模块主要实现两个功能:
对上封装了DVP、Camera驱动的ioctl接口(尽量做到和Linux MPP VIN保持一致)
对视频Buf队列的管理,实现了DVP应用、DVP驱动之间的Buf轮转管理
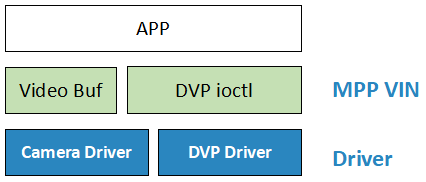
图 6.83 MPP VIN模块的软件框架¶
6.7.5.7.1. Buf队列管理¶
VIN模块中的队列管理,参考了Linux的V4L2框架,通过 struct vb_queue 结构中的两个Buf队列来管理,DVP驱动中还需要维护一个buf_list来配合DVP控制器的地址更新。
整个Buf流转的过程如下图:
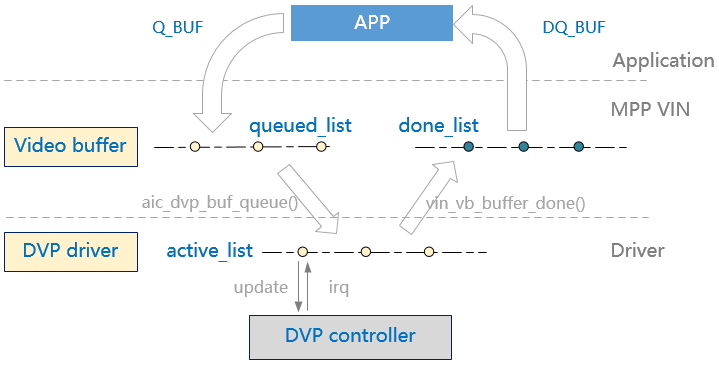
图 6.84 MPP VIN中的Buf队列管理¶
queued_list:是一些空闲Buf,等待Sensor的数据到来后,DVP驱动会从这个队列中找可用Buf来保存下一帧数据。
done_list:是一些填了视频数据的Buf,等待用户来处理这些数据,一般用户处理完后需要将Buf还给驱动,也就是通过Q_BUF命令还给queued_list。
从图中的流转过程看,运行期间,在某一时刻,DVP需要使用一个Buf,APP需要使用一个Buf,QBuf需要有一个Buf在等待(否则DVP的done中断来了后发现没有等待的Qbuf会发生丢帧),一共 至少要有3个Buf。
以YUV422格式计算,有两个plane,在V4L2框架中这一组plane算一个Buf,3个Buf就需要申请6个plane,
总大小 = 长 * 宽 * 2 * 3。
对于每一帧图像数据来说,DVP的输出有两个plane:Y和UV。针对DVP的两种输出格式:YUV422_COMBINED_NV16和YUV420_COMBINED_NV12,两个plane的空间大小如下表:
YUV422_COMBINED_NV16 |
YUV420_COMBINED_NV12 |
|
|---|---|---|
Plane Y |
Width * height |
Width * height |
Plane UV |
Width * height |
Width * height / 2 |
根据前面对“Buf队列管理”的分析可知:我们要分配的内存空间 至少要有3个Buf,每个Buf包含两个Plane。
6.7.5.7.2. 接口设计¶
6.7.5.7.2.1. mpp_vin_init¶
函数原型 |
int mpp_vin_init(char *camera) |
|---|---|
功能说明 |
初始化VIN模块,包括打开Camera设备、DVP设备、为Video Buf分配内存池 |
参数定义 |
camera - 摄像头的设备名称 |
返回值 |
0,成功;<0,失败 |
注意事项 |
内存池默认配置8MB,需要根据实际的应用场景来修改 |
6.7.5.7.2.2. mpp_vin_deinit¶
函数原型 |
int mpp_vin_deinit(void) |
|---|---|
功能说明 |
释放VIN模块的资源,包括关闭Camera设备和DVP设备,释放Video Buf内存池 |
参数定义 |
无 |
返回值 |
无 |
注意事项 |
6.7.5.7.2.3. mpp_dvp_ioctl¶
函数原型 |
int mpp_dvp_ioctl(int cmd, void *arg) |
|---|---|
功能说明 |
DVP 设备的ioctl接口 |
参数定义 |
cmd - ioctl 命令码
arg - ioctl 命令相应的参数
|
返回值 |
0,成功;<0,失败 |
注意事项 |
6.7.5.7.3. 参考Demo¶
命令行工具test_dvp实现了一个完整的 Sensor -> DVP -> DE 数据通路,从Camera采集数据、然后会显到DE 的Video layer。 整体的处理流程如下图(图中按照访问对象分为三列,实际上整体是串行执行):
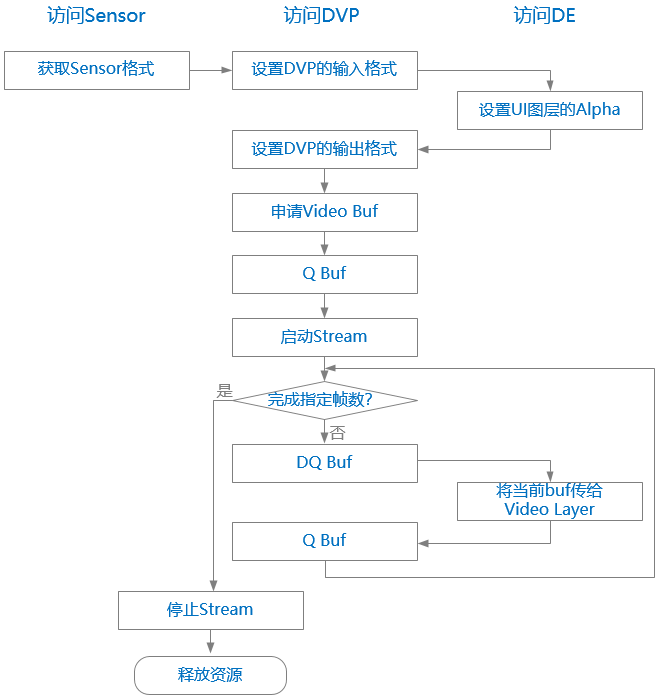
图 6.85 MPP VIN Demo 中的处理流程¶
此Demo的代码实现可作为MPP VIN的APP设计参考:(详见test_dvp.c)
#define VID_BUF_NUM 3
#define VID_BUF_PLANE_NUM 2
#define VID_SCALE_OFFSET 20
static const char sopts[] = "f:c:h";
static const struct option lopts[] = {
{"format", required_argument, NULL, 'f'},
{"capture", required_argument, NULL, 'c'},
{"usage", no_argument, NULL, 'h'},
{0, 0, 0, 0}
};
struct aic_dvp_data {
int w;
int h;
int frame_size;
int frame_cnt;
int dst_fmt; // output format
struct mpp_video_fmt src_fmt;
uint32_t num_buffers;
struct vin_video_buf binfo;
};
static struct aic_dvp_data g_vdata = {0};
#ifdef AIC_DISPLAY_DRV
static struct mpp_fb *g_fb = NULL;
static struct aicfb_screeninfo g_fb_info = {0};
#endif
/* Functions */
static void usage(char *program)
{
printf("Usage: %s [options]: \n", program);
printf("\t -f, --format\t\tformat of input video, NV16/NV12 etc\n");
printf("\t -c, --count\t\tthe number of capture frame \n");
printf("\t -u, --usage \n");
printf("\n");
printf("Example: %s -f nv16 -c 1\n", program);
}
static long long int str2int(char *_str)
{
if (_str == NULL) {
pr_err("The string is empty!\n");
return -1;
}
if (strncmp(_str, "0x", 2))
return atoi(_str);
else
return strtoll(_str, NULL, 16);
}
int get_fb_info(void)
{
int ret = 0;
#ifdef AIC_DISPLAY_DRV
ret = mpp_fb_ioctl(g_fb, AICFB_GET_SCREENINFO, &g_fb_info);
if (ret < 0)
pr_err("ioctl() failed! errno: -%d\n", -ret);
#endif
pr_info("Screen width: %d, height %d\n",
g_fb_info.width, g_fb_info.height);
return ret;
}
int set_ui_layer_alpha(int val)
{
int ret = 0;
#ifdef AIC_DISPLAY_DRV
struct aicfb_alpha_config alpha = {0};
alpha.layer_id = AICFB_LAYER_TYPE_UI;
alpha.enable = 1;
alpha.mode = 1;
alpha.value = val;
ret = mpp_fb_ioctl(g_fb, AICFB_UPDATE_ALPHA_CONFIG, &alpha);
if (ret < 0)
pr_err("ioctl() failed! errno: -%d\n", -ret);
#endif
return ret;
}
int sensor_get_fmt(void)
{
int ret = 0;
struct mpp_video_fmt f = {0};
ret = mpp_dvp_ioctl(DVP_IN_G_FMT, &f);
if (ret < 0) {
pr_err("ioctl() failed! err -%d\n", -ret);
// return -1;
}
g_vdata.src_fmt = f;
g_vdata.w = g_vdata.src_fmt.width;
g_vdata.h = g_vdata.src_fmt.height;
pr_info("Sensor format: w %d h %d, code 0x%x, bus 0x%x, colorspace 0x%x\n",
f.width, f.height, f.code, f.bus_type, f.colorspace);
return 0;
}
int dvp_subdev_set_fmt(void)
{
int ret = 0;
ret = mpp_dvp_ioctl(DVP_IN_S_FMT, &g_vdata.src_fmt);
if (ret < 0) {
pr_err("ioctl() failed! err -%d\n", -ret);
return -1;
}
return 0;
}
int dvp_cfg(int width, int height, int format)
{
int ret = 0;
struct dvp_out_fmt f = {0};
f.width = g_vdata.src_fmt.width;
f.height = g_vdata.src_fmt.height;
f.pixelformat = format;
f.num_planes = VID_BUF_PLANE_NUM;
ret = mpp_dvp_ioctl(DVP_OUT_S_FMT, &f);
if (ret < 0) {
pr_err("ioctl() failed! err -%d\n", -ret);
return -1;
}
return 0;
}
int dvp_request_buf(struct vin_video_buf *vbuf)
{
int i;
if (mpp_dvp_ioctl(DVP_REQ_BUF, (void *)vbuf) < 0) {
pr_err("ioctl() failed!\n");
return -1;
}
pr_info("Buf Plane[0] size Plane[1] size\n");
for (i = 0; i < vbuf->num_buffers; i++) {
pr_info("%3d 0x%x %8d 0x%x %8d\n", i,
vbuf->planes[i * vbuf->num_planes].buf,
vbuf->planes[i * vbuf->num_planes].len,
vbuf->planes[i * vbuf->num_planes + 1].buf,
vbuf->planes[i * vbuf->num_planes + 1].len);
}
return 0;
}
void dvp_release_buf(int num)
{
#if 0
int i;
struct video_buf_info *binfo = NULL;
for (i = 0; i < num; i++) {
binfo = &g_vdata.binfo[i];
if (binfo->vaddr) {
munmap(binfo->vaddr, binfo->len);
binfo->vaddr = NULL;
}
}
#endif
}
int dvp_queue_buf(int index)
{
if (mpp_dvp_ioctl(DVP_Q_BUF, (void *)(ptr_t)index) < 0) {
pr_err("ioctl() failed!\n");
return -1;
}
return 0;
}
int dvp_dequeue_buf(int *index)
{
int ret = 0;
ret = mpp_dvp_ioctl(DVP_DQ_BUF, (void *)index);
if (ret < 0) {
pr_err("ioctl() failed! err -%d\n", -ret);
return -1;
}
return 0;
}
int dvp_start(void)
{
int ret = 0;
ret = mpp_dvp_ioctl(DVP_STREAM_ON, NULL);
if (ret < 0) {
pr_err("ioctl() failed! err -%d\n", -ret);
return -1;
}
return 0;
}
int dvp_stop(void)
{
int ret = 0;
ret = mpp_dvp_ioctl(DVP_STREAM_OFF, NULL);
if (ret < 0) {
pr_err("ioctl() failed! err -%d\n", -ret);
return -1;
}
return 0;
}
#define DVP_SCALE 0
int video_layer_set(struct aic_dvp_data *vdata, int index)
{
#ifdef AIC_DISPLAY_DRV
int i;
struct aicfb_layer_data layer = {0};
struct vin_video_buf *binfo = &vdata->binfo;
layer.layer_id = AICFB_LAYER_TYPE_VIDEO;
layer.enable = 1;
#if DVP_SCALE
#if 0
layer.scale_size.width = g_fb_info.width - VID_SCALE_OFFSET * 2;
layer.scale_size.height = g_fb_info.height - VID_SCALE_OFFSET * 2;
layer.pos.x = VID_SCALE_OFFSET;
layer.pos.y = VID_SCALE_OFFSET;
#else
/* Reduce the size to fb0*1/2 */
layer.scale_size.width = g_fb_info.width / 2;
layer.scale_size.height = g_fb_info.height / 2;
layer.pos.x = g_fb_info.width / 2 - VID_SCALE_OFFSET;
layer.pos.y = g_fb_info.height / 2 - VID_SCALE_OFFSET;
#endif
#else
layer.scale_size.width = vdata->w;
layer.scale_size.height = vdata->h;
layer.pos.x = g_fb_info.width - vdata->w;
layer.pos.y = 0;
#endif
layer.buf.size.width = vdata->w;
layer.buf.size.height = vdata->h;
if (vdata->dst_fmt == MPP_FMT_NV16)
layer.buf.format = MPP_FMT_NV16;
else
layer.buf.format = MPP_FMT_NV12;
layer.buf.buf_type = MPP_PHY_ADDR;
for (i = 0; i < VID_BUF_PLANE_NUM; i++) {
layer.buf.stride[i] = vdata->w;
layer.buf.phy_addr[i] = binfo->planes[index * VID_BUF_PLANE_NUM + i].buf;
}
if (mpp_fb_ioctl(g_fb, AICFB_UPDATE_LAYER_CONFIG, &layer) < 0) {
pr_err("ioctl() failed!\n");
return -1;
}
#endif
return 0;
}
#define NS_PER_SEC 1000000000
static void show_fps(struct timespec *start, struct timespec *end, int cnt)
{
double diff;
if (end->tv_nsec < start->tv_nsec) {
diff = (double)(NS_PER_SEC + end->tv_nsec - start->tv_nsec)/NS_PER_SEC;
diff += end->tv_sec - 1 - start->tv_sec;
} else {
diff = (double)(end->tv_nsec - start->tv_nsec)/NS_PER_SEC;
diff += end->tv_sec - start->tv_sec;
}
printf("\nDVP frame rate: %d.%d, frame %d / %d.%d seconds\n",
(u32)(cnt / diff), (u32)(cnt * 10 / diff) % 10, cnt,
(u32)diff, (u32)(diff * 10) % 10);
}
static void test_dvp_thread(void *arg)
{
int i, index = 0;
struct timespec begin, now;
if (dvp_request_buf(&g_vdata.binfo) < 0)
return;
for (i = 0; i < g_vdata.binfo.num_buffers; i++) {
if (dvp_queue_buf(i) < 0)
return;
}
if (dvp_start() < 0)
return;
#if DVP_SCALE
pr_info("DVP scale is enable\n");
#else
pr_info("DVP scale is disable\n");
#endif
clock_gettime(CLOCK_REALTIME, &begin);
for (i = 0; i < g_vdata.frame_cnt; i++ ) {
if (dvp_dequeue_buf(&index) < 0)
break;
// pr_debug("Set the buf %d to video layer\n", index);
if (video_layer_set(&g_vdata, index) < 0)
break;
dvp_queue_buf(index);
if (i && (i % 1000 == 0)) {
clock_gettime(CLOCK_REALTIME, &now);
show_fps(&begin, &now, i);
}
}
if ((i - 1) % 1000 != 0) {
clock_gettime(CLOCK_REALTIME, &now);
show_fps(&begin, &now, i);
}
dvp_stop();
dvp_release_buf(g_vdata.binfo.num_buffers);
mpp_vin_deinit();
if (g_fb)
mpp_fb_close(g_fb);
}
static void cmd_test_dvp(int argc, char **argv)
{
int c;
aicos_thread_t thid = NULL;
memset(&g_vdata, 0, sizeof(struct aic_dvp_data));
g_vdata.dst_fmt = MPP_FMT_NV16;
g_vdata.frame_cnt = 1;
optind = 0;
while ((c = getopt_long(argc, argv, sopts, lopts, NULL)) != -1) {
switch (c) {
case 'f':
if (strncasecmp("nv12", optarg, strlen(optarg)) == 0)
g_vdata.dst_fmt = DVP_OUT_FMT_NV12;
continue;
case 'c':
g_vdata.frame_cnt = str2int(optarg);
continue;
case 'h':
usage(argv[0]);
return;
default:
break;
}
}
pr_info("Capture %d frames from camera\n", g_vdata.frame_cnt);
pr_info("DVP out format: %s\n",
g_vdata.dst_fmt == MPP_FMT_NV16 ? "NV16" : "NV12");
if (mpp_vin_init(CAMERA_NAME_OV))
return;
if (sensor_get_fmt() < 0)
goto error_out;
if (dvp_subdev_set_fmt() < 0)
goto error_out;
if (g_vdata.dst_fmt == MPP_FMT_NV16)
g_vdata.frame_size = g_vdata.w * g_vdata.h * 2;
else if (g_vdata.dst_fmt == DVP_OUT_FMT_NV12)
g_vdata.frame_size = (g_vdata.w * g_vdata.h * 3) >> 1;
g_fb = mpp_fb_open();
if (!g_fb) {
pr_err("Failed to open FB\n");
goto error_out;
}
if (get_fb_info() < 0)
goto error_out;
if (set_ui_layer_alpha(15) < 0)
goto error_out;
if (dvp_cfg(g_vdata.w, g_vdata.h, g_vdata.dst_fmt) < 0)
goto error_out;
g_vdata.num_buffers = VID_BUF_NUM;
thid = aicos_thread_create("test_dvp", 4096, 0, test_dvp_thread, NULL);
if (thid == NULL) {
pr_err("Failed to create DVP thread\n");
return;
}
return;
error_out:
mpp_vin_deinit();
if (g_fb)
mpp_fb_close(g_fb);
}
MSH_CMD_EXPORT_ALIAS(cmd_test_dvp, test_dvp,
Test DVP and camera);