6.3.5. 设计说明¶
6.3.5.1. 源码说明¶
源代码位于 bsp/artinchip/:
bsp/artinchip/drv/dvp/drv_dvp.c,DVP Driver 层实现
bsp/artinchip/hal/dvp/hal_dvp.c,DVP HAL 层实现
bsp/artinchip/include/hal/hal_dvp.h,DVP HAL 层接口头文件
6.3.5.2. 模块架构¶
整个软件系统的架构图如下:
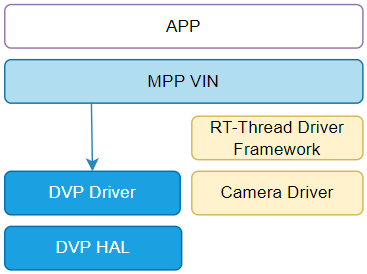
DVP驱动需要和我司的MPP中间件配合一起使用,DVP Driver层采用普通的API方式向上提供接口。
同时,DVP还需要和Camera外设的驱动配合一起完成图像数据的采集
MPP VIN模块对APP提供类似ioctl的接口封装,这样设计是为了和Linux中MPP VIN保持一致
DVP暂不支持在裸机环境中运行。
6.3.5.3. 关键流程设计¶
6.3.5.3.1. 初始化流程¶
总体上看,DVP驱动的初始化过程分为两大段:
阶段一:由probe()接口完成,完成中断申请、管理状态初始化等;
阶段二:由open()接口完成(需要等Sensor执行完初始化后才能执行),完成的操作有:使能时钟、使能DVP控制器、初始化Buf链表信息等。
6.3.5.3.3. 中断处理流程¶
DVP的中断处理函数中主要处理Buf的队列切换操作。 DVP硬件提供的中断可以反映出多个状态(包括出错状态),其中有两个比较重要:
- Update done
表示硬件已经读走了当前的Register值(影子寄存器),软件可以为下一帧去修改了;
- Frame done
表示当前帧的数据传输完成。
可见,Update done会先于Frame done发生,驱动中用Update done判断当前Register是否可以修改,用Frame done判断当前buf是否完成(done状态),该buf就可以从QBuf list切换到DQbuf list了。
按照DVP硬件设计的逻辑,Update done和Frame done会间隔着产生(不会连续两个Update done):
Update done -> Frame done -> Update done -> Frame done -> Update done -> Frame done ...
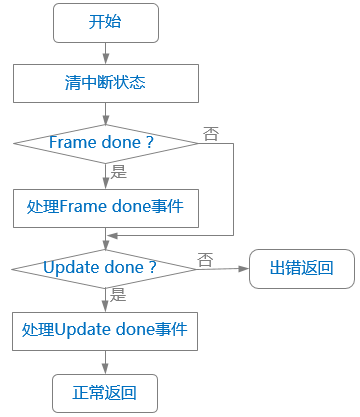
图 6.60 DVP 驱动中IRQ处理流程¶
“处理Frame done事件”的子流程如下:
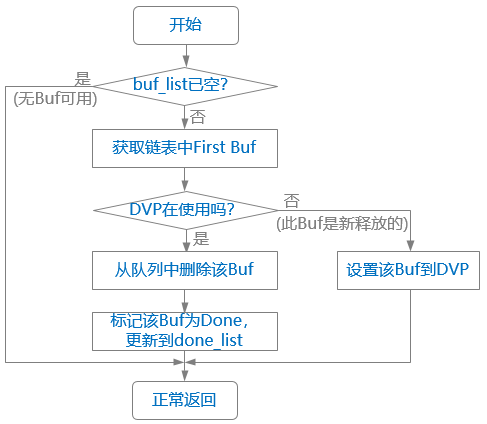
图 6.61 DVP 驱动中Frame done处理流程¶
“处理Update done事件”的子流程如下:
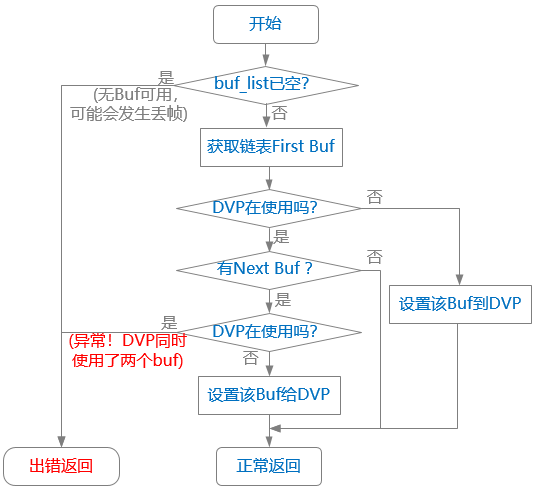
图 6.62 DVP 驱动中Update done处理流程¶
- “异常!DVP同时使用了两个Buf”
理论上不应该发生,可认为是DVP硬件异常,但因为DVP还在向Buf写数据,所以先不执行stop,软件上报错。
- “DVP在使用”
表示“DVP控制器硬件正在使用”。
6.3.5.4. 数据结构设计¶
6.3.5.4.1. struct aic_dvp¶
属于 Driver 层接口,定义了DVP控制器的设备管理信息:
struct aic_dvp {
struct aic_dvp_config cfg; /* The configuration of DVP HW */
struct dvp_out_fmt fmt; /* The format of output data */
/* Videobuf */
struct vb_queue queue;
struct list_head active_list;
aicos_mutex_t active_lock; /* lock of active buf list */
unsigned int sequence;
unsigned int streaming;
aicos_mutex_t lock;
};
6.3.5.4.2. struct aic_dvp_config¶
属于 HAL 层接口,定义了媒体数据的配置信息:
/* Save the configuration information for DVP controller. */
struct aic_dvp_config {
/* Input format */
enum dvp_input input;
enum dvp_input_yuv_seq input_seq;
u32 flags;
/* Output format */
enum dvp_output output;
u32 width;
u32 height;
u32 stride[DVP_PLANE_NUM];
u32 sizeimage[DVP_PLANE_NUM];
};
6.3.5.4.3. 输入输出的数据格式¶
6.3.5.4.3.1. enum dvp_input¶
属于 HAL 层接口,定义了DVP输入数据的格式:
enum dvp_input {
DVP_IN_RAW = 0,
DVP_IN_YUV422 = 1,
DVP_IN_BT656 = 2,
};
6.3.5.4.3.2. enum dvp_input_yuv_seq¶
属于 HAL 层接口,定义了DVP输入数据的YUV格式:
enum dvp_input_yuv_seq {
DVP_YUV_DATA_SEQ_YUYV = 0,
DVP_YUV_DATA_SEQ_YVYU = 1,
DVP_YUV_DATA_SEQ_UYVY = 2,
DVP_YUV_DATA_SEQ_VYUY = 3,
};
6.3.5.4.3.3. enum dvp_output¶
属于 HAL 层接口,定义了DVP输出数据的格式:
enum dvp_output {
DVP_OUT_RAW_PASSTHROUGH = 0,
DVP_OUT_YUV422_COMBINED_NV16 = 1,
DVP_OUT_YUV420_COMBINED_NV12 = 2,
};
6.3.5.5. Driver 层接口设计¶
6.3.5.5.1. aic_dvp_probe¶
函数原型 |
int aic_dvp_probe(void) |
|---|---|
功能说明 |
完成中断申请、管理状态初始化等 |
参数定义 |
无 |
返回值 |
0,成功;<0,失败 |
注意事项 |
6.3.5.5.2. aic_dvp_open¶
函数原型 |
int aic_dvp_open(void) |
|---|---|
功能说明 |
使能时钟、使能DVP控制器、初始化Buf链表信息等 |
参数定义 |
无 |
返回值 |
0,成功;<0,失败 |
注意事项 |
6.3.5.5.3. aic_dvp_close¶
函数原型 |
int aic_dvp_close(void) |
|---|---|
功能说明 |
关闭时钟、关闭DVP控制器 |
参数定义 |
无 |
返回值 |
0,成功;<0,失败 |
注意事项 |
6.3.5.5.4. aic_dvp_set_in_fmt¶
函数原型 |
int aic_dvp_set_in_fmt(struct mpp_video_fmt *fmt) |
|---|---|
功能说明 |
设置DVP的输入视频格式 |
参数定义 |
fmt - 指向struct mpp_video_fmt类型的指针 |
返回值 |
0,成功;<0,失败 |
注意事项 |
fmt一般是从Camera设备中读取到的格式信息 |
6.3.5.5.5. aic_dvp_set_out_fmt¶
函数原型 |
int aic_dvp_set_out_fmt(struct dvp_out_fmt *fmt) |
|---|---|
功能说明 |
设置DVP的输出图像格式 |
参数定义 |
fmt - 指向struct dvp_out_fmt类型的指针 |
返回值 |
0,成功 |
注意事项 |
6.3.5.5.6. aic_dvp_stream_on¶
函数原型 |
int aic_dvp_stream_on(void) |
|---|---|
功能说明 |
启动视频流 |
参数定义 |
无 |
返回值 |
0,成功;<0,失败 |
注意事项 |
6.3.5.5.7. aic_dvp_stream_off¶
函数原型 |
int aic_dvp_stream_off(void) |
|---|---|
功能说明 |
关闭视频流 |
参数定义 |
无 |
返回值 |
0,成功;<0,失败 |
注意事项 |
6.3.5.5.8. aic_dvp_req_buf¶
函数原型 |
int aic_dvp_req_buf(char *buf, u32 size, struct vin_video_buf *vbuf) |
|---|---|
功能说明 |
按照给定的Video Buf配置信息从内存池中申请Buf |
参数定义 |
buf - 指向内存池的指针
size - 内存池的总大小
vbuf - Video Buf的配置信息
|
返回值 |
0,成功;<0,失败 |
注意事项 |
6.3.5.5.9. aic_dvp_q_buf¶
函数原型 |
int aic_dvp_q_buf(u32 index) |
|---|---|
功能说明 |
释放指定index的Buf进入空闲队列(queued_list) |
参数定义 |
index - Buf的索引号 |
返回值 |
0,成功;<0,失败 |
注意事项 |
6.3.5.5.10. aic_dvp_dq_buf¶
函数原型 |
int aic_dvp_dq_buf(u32 *pindex) |
|---|---|
功能说明 |
从DVP处理完成后的队列(done_list)中获取一个Buf |
参数定义 |
pindex - 用于保存获取到的Buf索引号 |
返回值 |
0,成功;<0,失败 |
注意事项 |