7.2.5. 设计说明¶
7.2.5.1. 源码说明¶
源代码位于 bsp/artinchip/:
bsp/artinchip/drv/cap/drv_cap.c,CAP Driver 层实现
bsp/artinchip/hal/pwmcs/hal_cap.c,PWMCS CAP模块的 HAL 层实现
bsp/artinchip/include/hal/hal_cap.h,PWMCS CAP模块的 HAL 层接口头文件
7.2.5.2. 模块架构¶
CAP 驱动 Driver 层采用 RT-Thread 的 INPUT CAPTURE 设备驱动框架,如果只使用 HAL 层也可以支持 Baremetal 方式的应用场景。
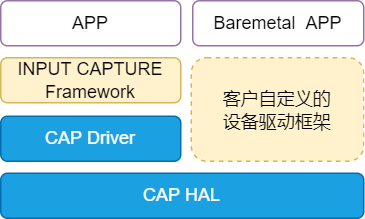
图 7.45 CAP 驱动的软件架构图¶
7.2.5.3. 关键流程设计¶
7.2.5.3.1. 初始化流程¶
CAP 驱动的初始化接口通过 INIT_DEVICE_EXPORT(drv_cap_init) 完成,主要是通过调用 INPUT CAPTURE 子系统的接口 rt_device_inputcapture_register() 注册一个 CAP 设备。
CAP 控制器的配置过程,主要步骤有:
初始化 PWMCS 模块的 clk
使能 CAP 指定通道的 clk
设置 CAP 捕捉事件
使能 CAP 的中断
启动 CAP 计数
7.2.5.4. 数据结构设计¶
7.2.5.4.1. struct aic_cap_data¶
属于 HAL 层接口,记录每一个 CAP 通道的捕捉数据信息:
struct aic_cap_data {
u8 id;
u32 freq;
float duty;
};
7.2.5.4.2. struct aic_cap¶
属于 Driver 层接口,记录一个 CAP 设备的配置信息:
struct aic_cap {
struct rt_inputcapture_device rtdev;
struct aic_cap_data *data;
};
7.2.5.5. Driver 层接口设计¶
以下接口是 INPUT CAPTURE 设备驱动框架的标准接口。
struct rt_inputcapture_ops
{
rt_err_t (*init)(struct rt_inputcapture_device *inputcapture);
rt_err_t (*open)(struct rt_inputcapture_device *inputcapture);
rt_err_t (*close)(struct rt_inputcapture_device *inputcapture);
rt_err_t (*get_pulsewidth)(struct rt_inputcapture_device *inputcapture, rt_uint32_t *pulsewidth_us);
};
7.2.5.5.1. aic_cap_init¶
函数原型 |
static rt_err_t aic_cap_init(struct rt_inputcapture_device *capture) |
|---|---|
功能说明 |
初始化配置一路 CAP |
参数定义 |
capture - 指向 rt_inputcapture_device 设备的指针
|
返回值 |
0,成功;<0,失败 |
注意事项 |
7.2.5.5.2. aic_cap_open¶
函数原型 |
static rt_err_t aic_cap_open(struct rt_inputcapture_device *capture) |
|---|---|
功能说明 |
打开 CAP |
参数定义 |
capture - 指向 rt_inputcapture_device 设备的指针
|
返回值 |
0,成功;<0,失败 |
注意事项 |
7.2.5.5.3. aic_cap_close¶
函数原型 |
static rt_err_t aic_cap_close(struct rt_inputcapture_device *capture) |
|---|---|
功能说明 |
关闭 CAP |
参数定义 |
capture - 指向 rt_inputcapture_device 设备的指针
|
返回值 |
0,成功;<0,失败 |
注意事项 |
7.2.5.5.4. aic_cap_get_pulsewidth¶
函数原型 |
static rt_err_t aic_cap_get_pulsewidth(struct rt_inputcapture_device *capture, rt_uint32_t *pulsewidth_us) |
|---|---|
功能说明 |
计算占空比与周期值 |
参数定义 |
capture - 指向 rt_inputcapture_device 设备的指针
pulsewidth_us - RT-Thread 回调参数脉冲间隔变量的指针
|
返回值 |
0,成功;<0,失败 |
注意事项 |
AIC 除了提供标准回调参数 pulsewidth_us 外,另外提供了回调参数:频率与占空比 |
7.2.5.6. HAL 层接口设计¶
HAL 层的函数接口声明存放在 hal_cap.h 中,主要接口有:
void hal_cap_ch_init(u32 ch);
void hal_cap_ch_deinit(u32 ch);
void hal_cap_int_enable(u32 ch, int enable);
u32 hal_cap_int_sta(void);
u32 hal_cap_is_pending(u32 ch);
int hal_cap_set_freq(u32 ch, u32 freq);
int hal_cap_set_cnt(u32 ch, u32 cnt);
int hal_cap_get(u32 ch);
int hal_cap_in_config(u32 ch);
u32 hal_cap_reg0(u32 ch);
u32 hal_cap_reg1(u32 ch);
u32 hal_cap_reg2(u32 ch);
u32 hal_cap_int_flg(u32 ch);
void hal_cap_clr_flg(u32 ch, u32 stat);
int hal_cap_enable(u32 ch);
int hal_cap_disable(u32 ch);
void hal_cap_cnt_start(u32 ch);
void hal_cap_cnt_stop(u32 ch);
int hal_cap_init(void);
int hal_cap_deinit(void);
void hal_cap_status_show(void);
7.2.5.7. Demo¶
本 Demo 是 test_cap 的部分源码(bsp/examples/test-cap/test_cap.c):
#define WATER_MARK 50
struct aic_cap_usr {
rt_uint8_t id;
rt_uint32_t freq;
float duty;
};
/* callback function */
static rt_err_t cap_cb(rt_device_t dev, rt_size_t size)
{
struct rt_inputcapture_data inputcap_data[WATER_MARK];
rt_device_read(dev, 0, (void *)inputcap_data, size);
#ifdef ULOG_USING_ISR_LOG
struct aic_cap_usr *data = (struct aic_cap_usr *)dev->user_data;
rt_kprintf("cap%d: freq:%dHz, duty:%d.%02d%%\n",
data->id, data->freq, (rt_uint32_t)data->duty, (rt_uint32_t)(data->duty * 100) % 100);
for (int i = 0; i < size; i++)
rt_kprintf("%s: pulsewidth:%d us\n", &dev->parent.name, inputcap_data[i].pulsewidth_us);
#endif
return RT_EOK;
}
int test_cap(int argc, char **argv)
{
rt_uint32_t watermark = WATER_MARK;
rt_device_t cap_dev = RT_NULL;
char device_name[8] = {"cap"};
int ret;
if (argc != 2) {
rt_kprintf("Usage: test_cap <channel>\n");
return -RT_ERROR;
}
strcat(device_name, argv[1]);
cap_dev = rt_device_find(device_name);
if (cap_dev == RT_NULL) {
rt_kprintf("Can't find %s device!\n", device_name);
return -RT_ERROR;
}
/* set callback function */
rt_device_set_rx_indicate(cap_dev, cap_cb);
ret = rt_device_control(cap_dev, INPUTCAPTURE_CMD_SET_WATERMARK, &watermark);
if (ret != RT_EOK) {
rt_kprintf("Failed to set %s device watermark!\n", device_name);
return ret;
}
ret = rt_device_open(cap_dev, RT_DEVICE_OFLAG_RDWR);
if (ret != RT_EOK) {
rt_kprintf("Failed to open %s device!\n", device_name);
return ret;
}
rt_kprintf("cap%d open.\n", atoi(argv[1]));
return RT_EOK;
}
MSH_CMD_EXPORT_ALIAS(test_cap, test_cap, Test the cap);